Utkarsh Sinha
Robotics
I worked on a few robots while in university. It was just for fun - and my team and I learned quite a bit by the end of it.
IP-Bot: BITS-Pilani, Goa
This was the first robot we made. The idea was to make it traverse an area only through the red tiles. We were able to implement some rudimentary feedback mechanism. So the robot would move and then check if it reached its destination. If not, it would try and come up with a new solution to reach the destination.
It worked just fine - but we were not experts at Matlab back then. So taking a snap and processing it took almost 10 seconds. So this implementation was super slow.
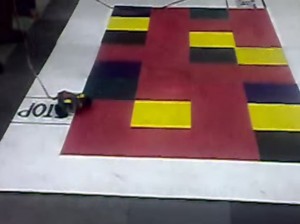
IP Bot arena
Shaastra: IIT-Madras
This was our second robot - with the same team. This time, the arena had several distinctly colored blocks that were scattered through out. The goal was to put them where they belong. Simple enough.
But the setup we got at IIT-Madras was not exactly the most awesome one. The colors on the blocks merged into each other (imagine a red block and a green block having similar RGB values).

The library scanner
GOAL: IIT-Bombay
This was by far the most sophisticated arena we encountered. The idea was to have two competing robots put in balls into the opponent’s goal. It was fun thinking about all the complicated cases that might have occured. But we ended up using only some basic logic and basic tactics to score goals.
We had the same team again - together for one last gig, before we retired to do bigger and better things!

The arena used for GOAL

The team: Sanjay, Jenish, Me, Prakhar